写在前面 Intro
这里写一些详细的作品经历,可能会有一些很不完善的。
Here are some detailed work experiences, which may be incomplete.
我是在进行Robocon比赛期间开始学习的硬件知识。这部分比较基础了,放出来也只是记录一下。
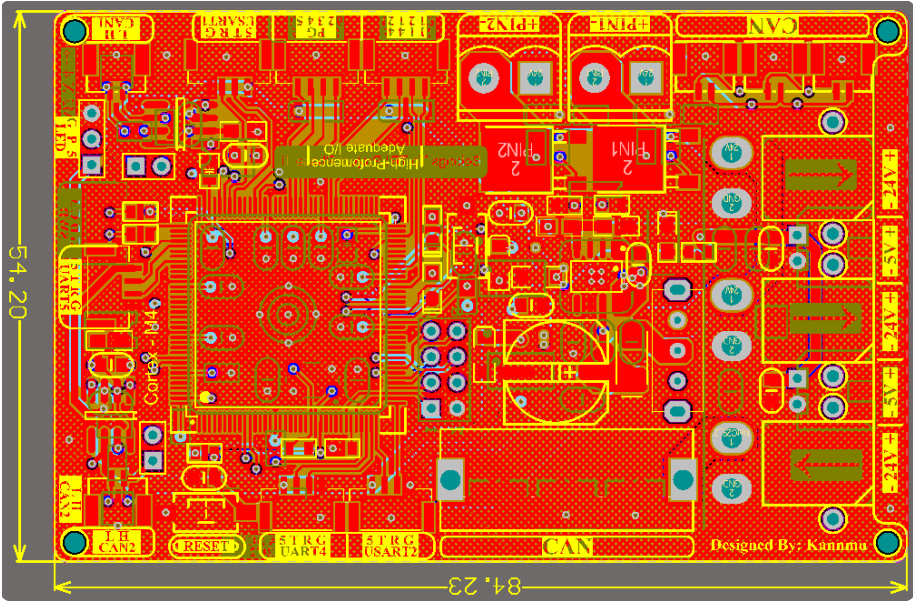
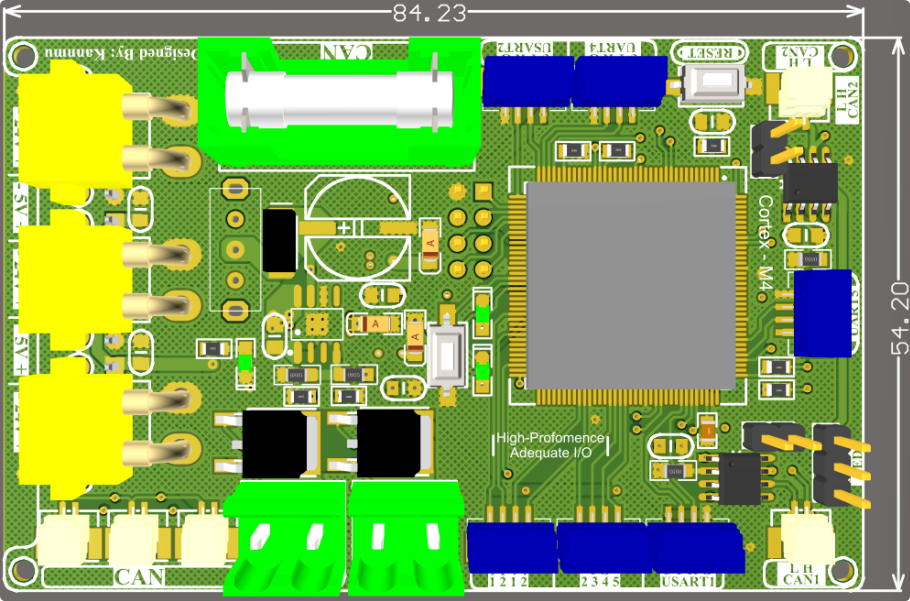
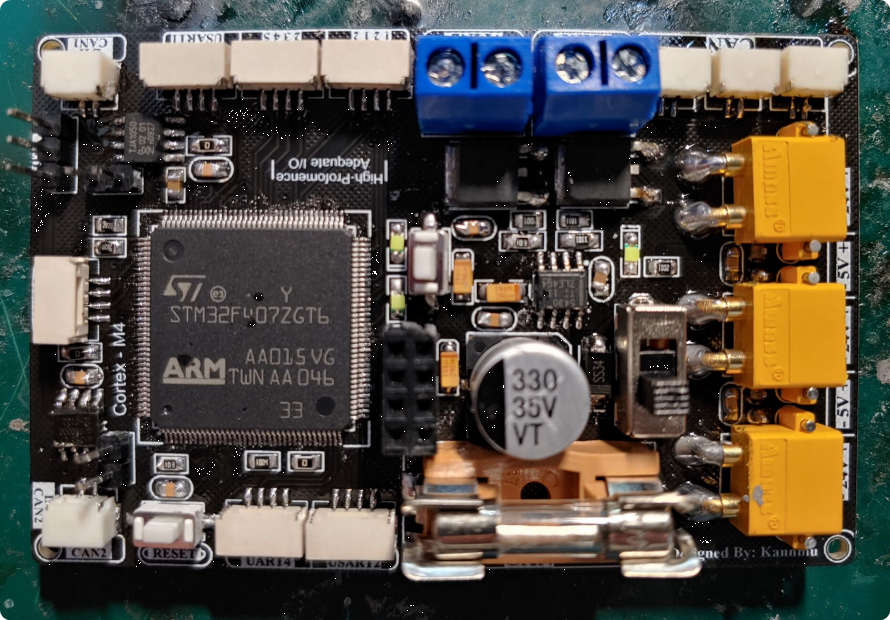
基于 STM32F407ZGT6 的机器人主控板
Robot control board based on STM32F407ZGT6``
24V 输入
6 路 串口通信接口
2 路 CAN 通信
2 路 集成 NMOS 管
支持 WS2812 灯带接口
NRF无线模块接口
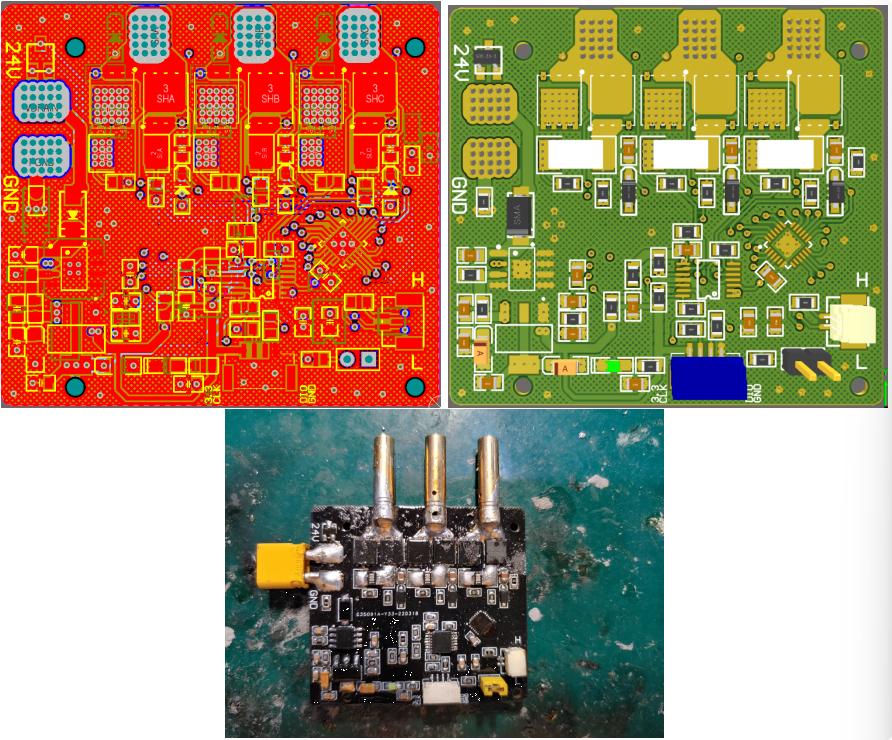
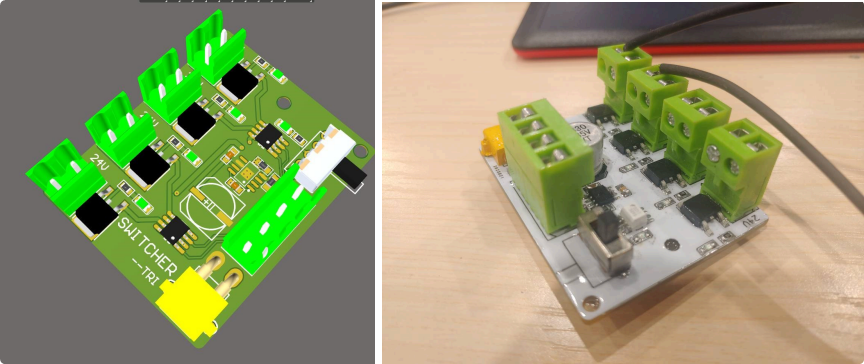
NMOS 管高速开关
High-Speed switch using NMOS``
由于有个项目需要对气阀进行高速开关,而继电器最大通断频率一般只有50Hz,所以设计这个用来替代继电器进行高速气阀控制。
BLDC 电机 FOC 驱动器(未成功)
FOC driver for BLDC motor (Unfinished)``
这个前前后后迭代了有5、6代都炸了,最终还是没成功放弃了。